Técnica nova de impressão 3D promete criar músculos para robôs
O dia está chegando em que você pode passar por um robô na rua sem fazer a mínima ideia de que era um robô. Ao longo de anos de engenharia, demos aos robôs esqueletos, cérebros, sentidos e até mesmo um sistema nervoso. Os músculos têm se mostrado particularmente complexos (não que as outras coisas tenham sido fáceis).
Pesquisadores da Escola de Engenharia e Ciências Aplicadas da Universidade Harvard (Harvard SEAS) desenvolveram um método para a impressão 3D de filamentos artificiais semelhantes a músculos, cujo movimento é efetivamente programado diretamente no material.
O trabalho parece ser o mais próximo que os sistemas musculares robóticos chegaram dos músculos humanos. Antes de continuar, você não precisa se preocupar em disputar aparelhos na academia durante uma revolta dos robôs. Não é esse tipo de músculo… ainda. Agora que isso ficou claro, por que afinal dar músculos aos robôs?
A questão é que o mundo natural exige flexibilidade. Tudo, de árvores a polvos, se dobra e se torce. Nós também construímos um mundo humano que exige essa mesma adaptabilidade. Infraestruturas, roupas, ferramentas e até interações sociais foram projetadas em torno da mecânica de corpos biológicos macios.
Além da flexibilidade, interagir com o nosso mundo é um dos motivos pelos quais engenheiros de robótica continuam tentando tornar as máquinas mais parecidas com os humanos, equipando-as com sistemas de visão (olhos), microfones (ouvidos), alto-falantes (bocas), sensores de toque e muitos outros sistemas.
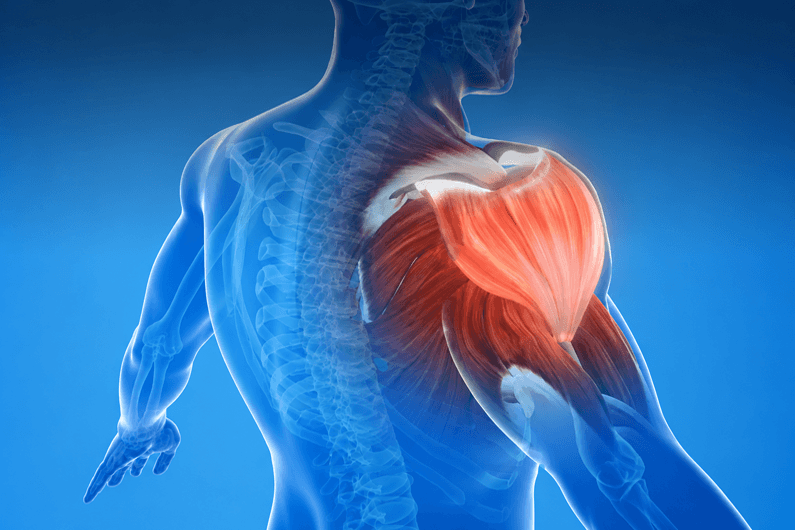
Tais sistemas têm sido tremendamente funcionais e eficazes. Já os músculos, porém, têm sido difíceis de reproduzir. Para os humanos, os músculos são apenas mais uma das coisas que ignoramos no dia a dia. Você pensa em mover o braço e, de repente, ele se levanta como se fosse mágica. Exceto que não é magia, pois trata-se de um sistema biológico de atuação absurdamente sofisticado. Os mesmos músculos capazes de guiar delicadamente um pincel sobre uma tela também podem derrubar portas, lançar machados, executar balé ou pegar um copo antes que ele atinja o chão.
Esse nível de controle é impressionante do ponto de vista da engenharia.
Robôs tradicionais já se movimentam extremamente bem usando motores elétricos, sistemas hidráulicos e pneumáticos. No entanto, esses sistemas geralmente são rígidos, mecanicamente complexos e pouco graciosos. Um movimento verdadeiramente fluido e orgânico continua sendo muito mais difícil de reproduzir.
Na verdade, pesquisadores já desenvolveram músculos robóticos macios antes. Músculos artificiais pneumáticos, por exemplo, usam ar comprimido para criar movimentos suaves, semelhantes aos biológicos. Outros sistemas utilizam metais sensíveis ao calor, polímeros que respondem à eletricidade, materiais magnéticos ou sistemas de tendões acionados por cabos inspirados no próprio corpo humano. Muitos deles são notavelmente eficazes.
O problema está nos compromissos e limitações.
Esses sistemas geralmente exigem compressores externos volumosos, tubulações ou sistemas pesados de suporte. Outros necessitam de tensões bastante altas, geram calor excessivo, se movem lentamente ou são difíceis de fabricar em formas complexas. Em muitos casos, o “músculo” em si é apenas uma parte de um sistema mecânico muito maior.
Todavia, os pesquisadores podem ter encontrado uma abordagem mais elegante. Em vez de construir robôs com motores separados e mecanismos móveis, a equipe desenvolveu um método para imprimir em 3D filamentos artificiais semelhantes a músculos, cujo movimento é efetivamente programado diretamente no material.
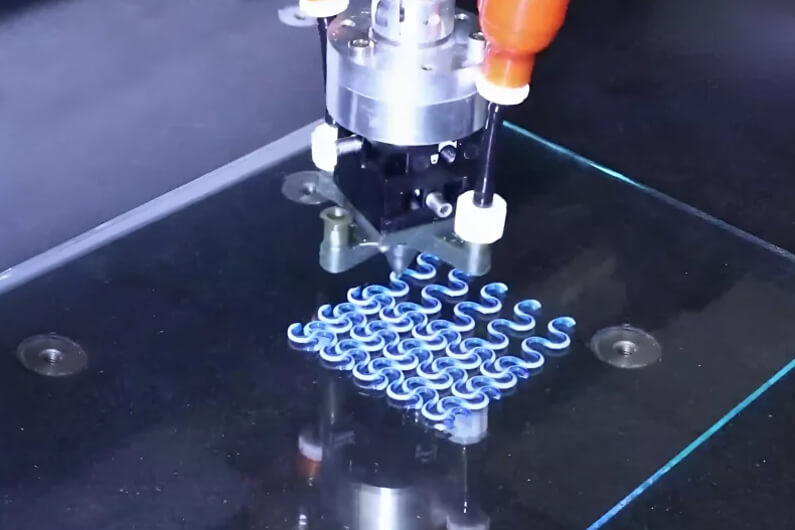
O sistema combina dois tipos de materiais macios: um elastômero de cristal líquido “ativo”, que muda de forma quando aquecido, e um elastômero passivo, que resiste à deformação. Ao imprimir os dois materiais lado a lado por meio de um bocal giratório, os pesquisadores conseguem controlar com precisão como partes diferentes do filamento irão se comportar posteriormente.
O material ativo se contrai ao longo de uma direção molecular preferencial quando aquecido. Como o material passivo resiste a essa contração, a diferença força o filamento a se curvar, enrolar, torcer ou formar espirais. Girar o bocal durante a impressão adiciona outra camada de controle e registra padrões helicoidais de alinhamento molecular diretamente na estrutura.
Um único filamento pode ser programado para se endireitar, espiralar, apertar, encolher ou expandir, dependendo de como seus materiais internos são organizados, sem engrenagens, articulações rígidas ou sistemas mecânicos de pós-montagem.
A equipe demonstrou isso ao imprimir malhas macias e filamentos ondulados que se deformam de maneiras dramaticamente diferentes sob o calor. Algumas estruturas se expandiram quando aquecidas, enquanto outras se contraíram. Em uma demonstração, malhas planas se transformaram em formas semelhantes a cúpulas. Em outra, os pesquisadores criaram garras macias capazes de descer sobre objetos, apertá-los, levantá-los e depois soltá-los.
Os pesquisadores afirmam que a tecnologia poderá futuramente viabilizar garras robóticas adaptativas e macias, filtros ativos, dispositivos biomédicos, estruturas responsivas à temperatura e sistemas robóticos capazes de mudar de forma. Como a abordagem é compatível com a impressão 3D, ela também abre caminho para arquiteturas altamente personalizáveis que seriam difíceis de construir com atuadores convencionais.
Ainda existem limitações importantes, porém. Atualmente, o sistema depende de calor para ser ativado, o que significa que o tempo de resposta e a eficiência energética continuam sendo um desafio. As estruturas também ainda são experimentais e estão longe de substituir atuadores robóticos tradicionais em usos de alta potência.
Fonte do artigo: Harvard SEAS
Artigo original (em inglês) publicado por Etiido Uko na New Atlas.
Sobre o autor
Etiido Uko é engenheiro mecânico e redator técnico sênior com mais de oito anos de experiência em documentação e relatórios. Apaixonado por tudo ligado à engenharia e tecnologia, ele é especialista em manufatura, robótica, ciência dos materiais e aeroespacial. Seu trabalho abrange criar conteúdo para líderes da indústria, como Autodesk, Siemens, Telus e Coca-Cola, entre outras.





